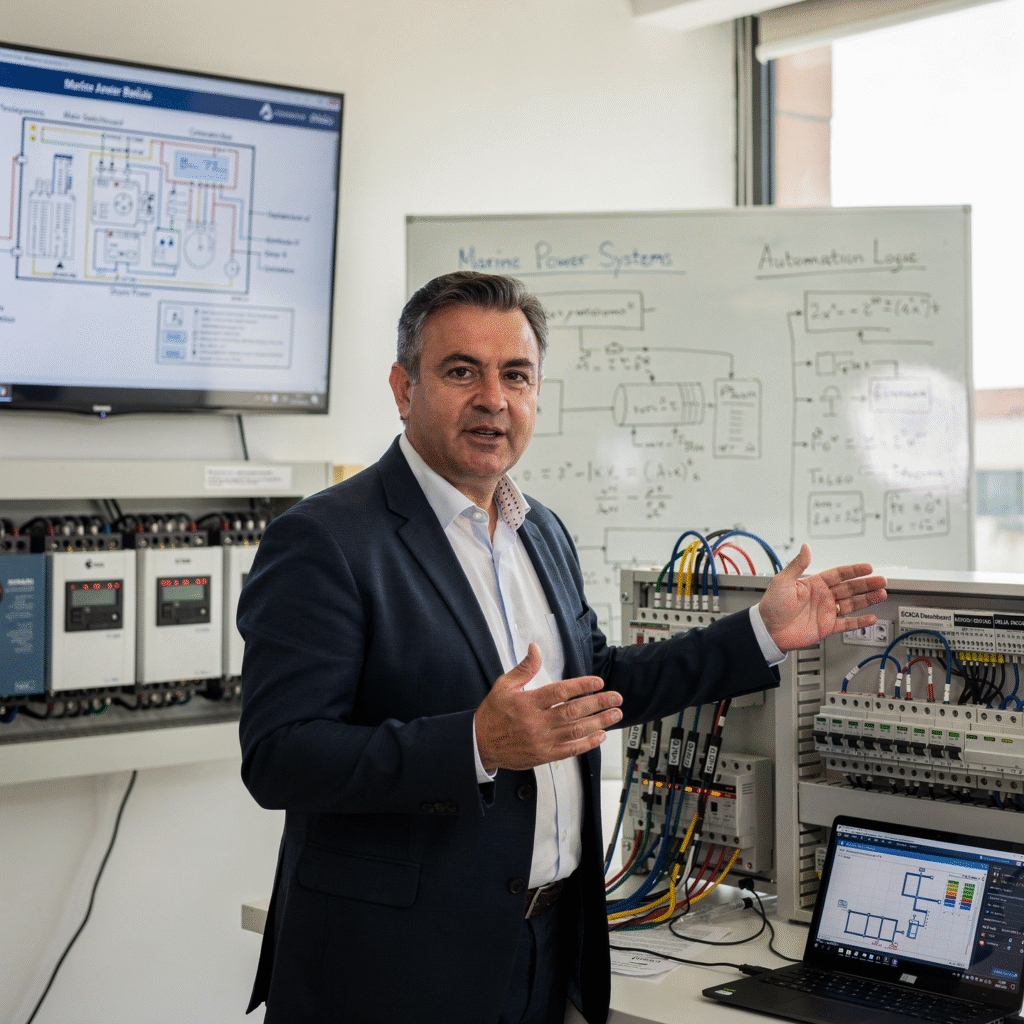

Designing efficient underwater robotic systems:
Optimize ROV hydrodynamics and control to minimize energy consumption and maximize maneuverability in diverse ocean conditions.

Implement preventive maintenance on underwater robots:
“Develop and implement maintenance plans based on operating hours, failure history, and manufacturer recommendations, including visual inspections, functional testing, and replacement of critical components.”

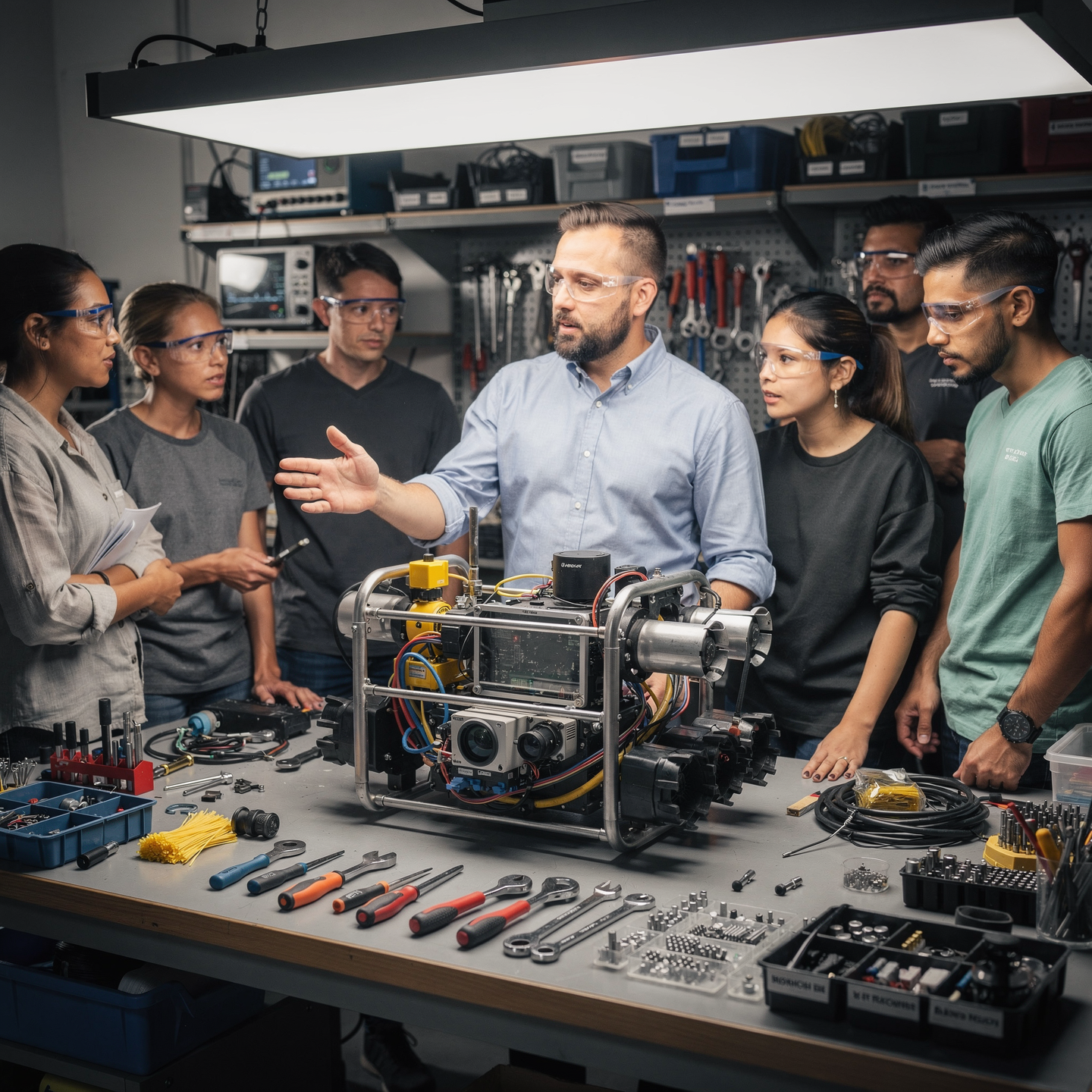
Operate and program ROVs for underwater inspection and repair:
“Execute precise and safe maneuvers, interpreting sensor data, optimizing the use of tools, and complying with safety protocols.”

Analyzing sensor data for underwater decision-making:
Interpret sensor patterns (acoustic, optical, pressure) to identify objects, assess risks, and optimize underwater navigation and operations.

Developing robotic solutions for the exploration of hostile underwater environments:
Implement robust autonomous navigation systems, capable of adapting in real time to currents, unforeseen obstacles and variations in visibility, ensuring the safety of the robot and the quality of the data collected.
Supervise and manage underwater robotics projects:
“To ensure efficient, safe and on-budget execution, optimizing resources and resolving technical problems quickly and effectively.”




Academic/professional profile:
Degree/Bachelor's degree in Nautical Science/Maritime Transport, Naval/Marine Engineering, or a related field; or proven professional experience in bridge/operations.

Language proficiency:
Recommended functional maritime English (SMCP) for simulations and technical materials.

Documentation:
Updated resume, copy of degree or seaman's book, ID card/passport, letter of motivation.
Technical requirements (for online):
Equipment with camera/microphone, stable connection, ≥ 24” monitor recommended for ECDIS/Radar-ARPA.

1. Online
application
(form + documents).
2. Academic review and interview
(profile/objectives/schedule compatibility).

3. Admission decision
(+ scholarship proposal if applicable).
4. Reservation of place
(deposit) and registration.

5. Induction
(access to campus, calendars, simulator guides).

The Diploma in Applied Underwater Robotics exceeded my expectations. I acquired a solid foundation in the design, control, and operation of ROVs, applying this knowledge in practical projects using simulators and real platforms. This enabled me to lead the development of an underwater inspection system for our company, reducing costs and risks in offshore operations.
The Diploma in Underwater Technology exceeded my expectations. I gained a solid understanding of ROV design, operation, and maintenance, as well as a deep grasp of the principles of underwater acoustics and oceanography. The hands-on experience with simulators and real equipment allowed me to develop crucial skills for the industry, opening doors to job opportunities in the offshore sector. Thanks to this training, I secured a position as an ROV technician at a leading underwater services company.
This diploma program exceeded my expectations. I acquired solid theoretical and practical knowledge in underwater robotics, from design and control to navigation and manipulation. The experience with simulators and real platforms allowed me to apply what I learned and develop crucial skills for my professional development in the offshore industry.
This diploma program provided me with the tools and knowledge necessary to develop an autonomous control system for an ROV used in oil platform inspections. I successfully implemented machine vision algorithms for anomaly detection, optimizing inspection time by 30% and improving the accuracy of critical fault identification.