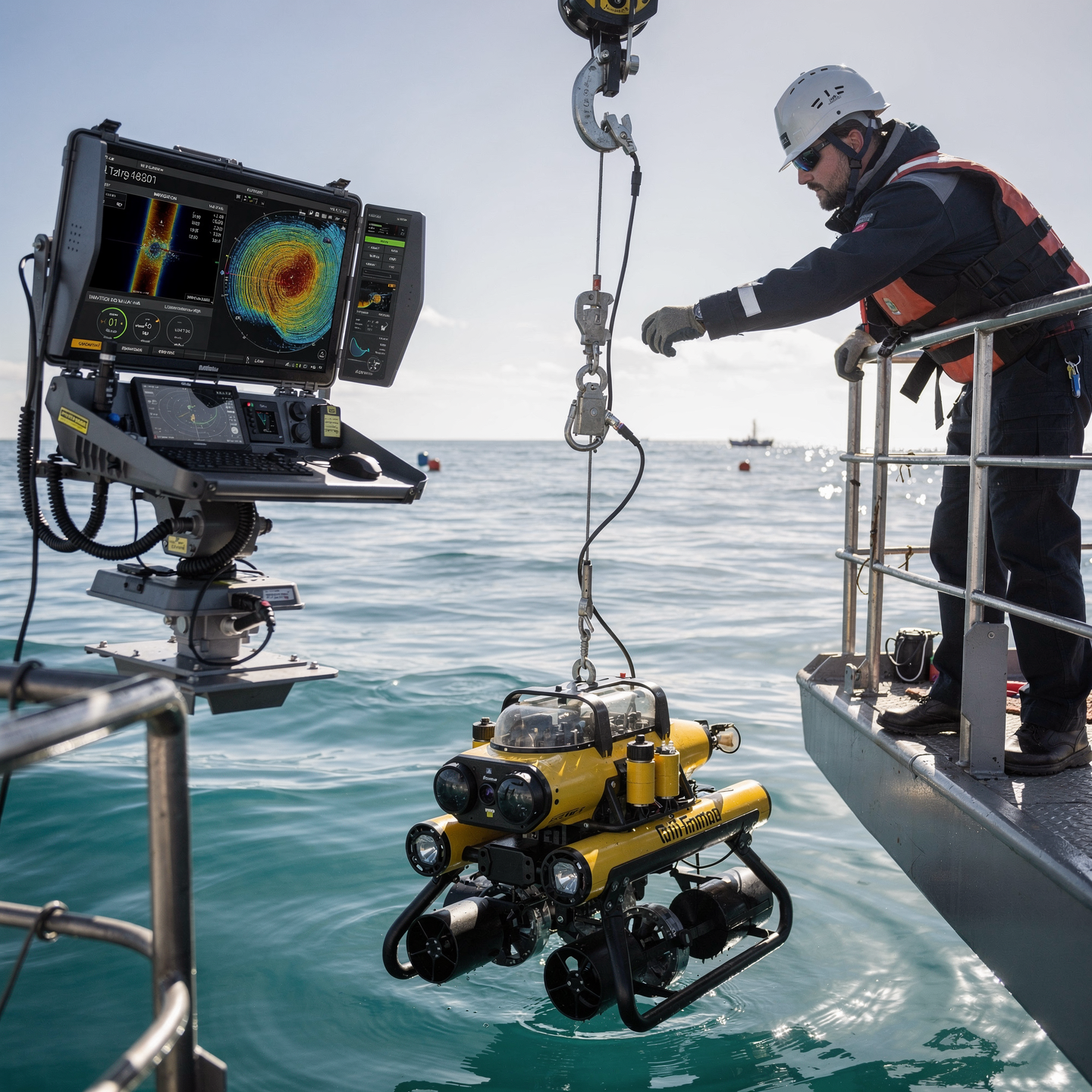

Conduct detailed inspections and collect accurate data in hazardous underwater environments:
“Using ROVs and advanced sensors to assess the integrity of structures, identify risks, and document findings with millimeter precision.”

Mapping and modeling complex underwater environments in 3D:
Integrate data from multiple sensors (sonar, LIDAR, cameras) and SLAM algorithms for accurate and robust reconstructions, even in low visibility conditions and dynamic terrain.

Perform maintenance and repair tasks on remote underwater infrastructure:
“Diagnosing faults using ROVs and remote control tools, repairing pipes, cables and structures with specialized techniques and following strict safety protocols.”

Detect and neutralize underwater threats autonomously:
“Use advanced ASW systems (sonobuoys, variable towed sonar) for location, identification and tracking, adapting tactics to the detected acoustic signature and oceanographic conditions.”

Respond quickly to underwater emergencies, such as leaks or accidents:
“Act promptly according to emergency procedures, prioritizing the safety of human life and the environment, coordinating with rescue teams and port authorities.”
Optimize the exploration and extraction of underwater natural resources:
Implement cutting-edge technologies for the accurate detection of deposits, minimizing the environmental impact during extraction and maximizing the efficiency of the process.




Academic/professional profile:
Degree/Bachelor's degree in Nautical Science/Maritime Transport, Naval/Marine Engineering, or a related field; or proven professional experience in bridge/operations.

Language proficiency:
Recommended functional maritime English (SMCP) for simulations and technical materials.

5. Induction
Updated resume, copy of degree or seaman's book, ID card/passport, letter of motivation.
Technical requirements (for online):
Equipment with camera/microphone, stable connection, ≥ 24” monitor recommended for ECDIS/Radar-ARPA.

1. Online
application
(form + documents).
2. Academic review and interview
(profile/objectives/schedule compatibility).

3. Admission decision
(+ scholarship proposal if applicable).
4. Reservation of place
(deposit) and registration.

5. Induction
(access to campus, calendars, simulator guides).

During my training in underwater drones, I successfully completed the development and implementation of an autonomous navigation system for the inspection of oil platforms, achieving 98% accuracy in detecting structural anomalies and reducing inspection time by 40% compared to traditional methods.
During the Robotics and Underwater Technology course, I exceeded my expectations by designing and programming an ROV capable of navigating an underwater obstacle course, demonstrating fluency in the control software and a deep understanding of buoyancy and propulsion principles. This project allowed me to effectively apply knowledge of electronics, mechanics, and hydrodynamics, solidifying my interest in ocean engineering.
During my underwater drone training, I exceeded expectations by designing an autonomous navigation system that allowed the drone to map a coral reef with 98% accuracy, collecting high-quality visual and sensory data crucial for a biodiversity study.
I managed to develop an autonomous control system for an underwater drone that successfully mapped a coral reef at a depth of 30 meters, collecting high-quality visual and environmental data during a 2-hour mission without human intervention.