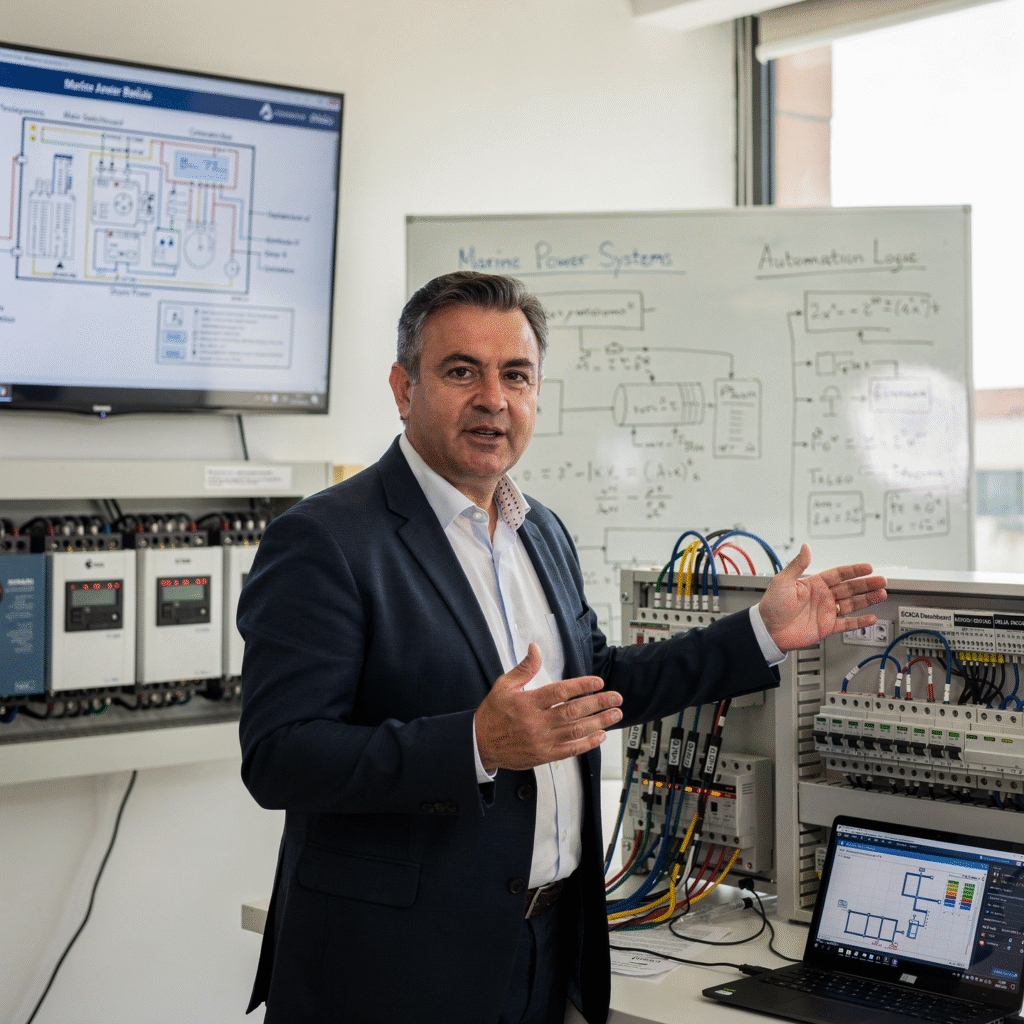

Understanding the architecture and key components of ROVs:
“Identify the propulsion, control, power, and communication systems, as well as their interrelation in the overall operation of the ROV.”

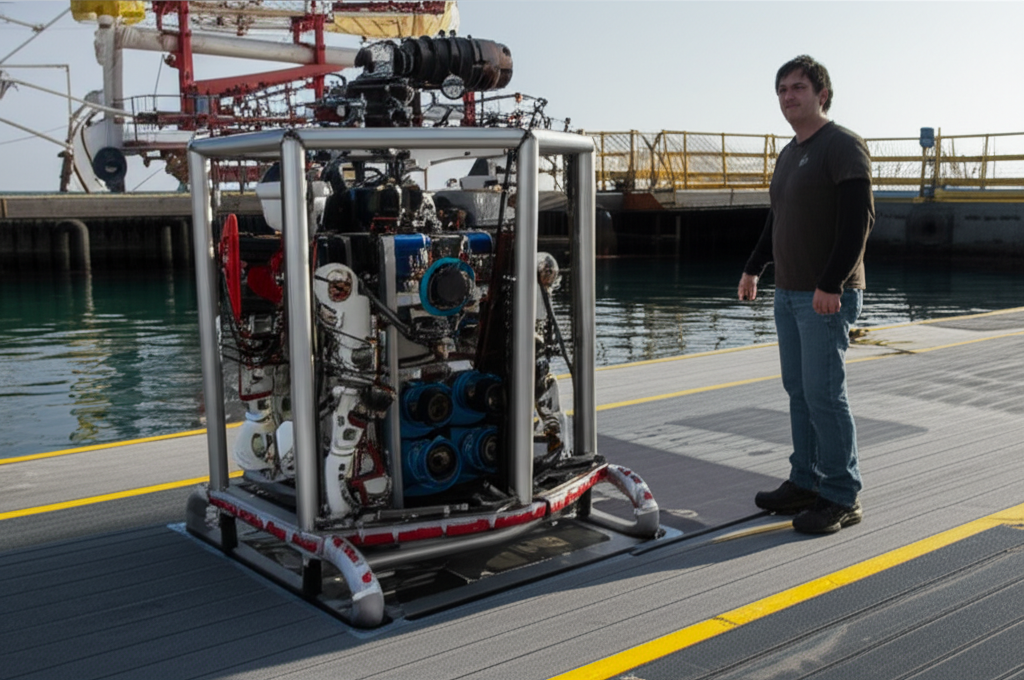
Operating ROVs in a basic and safe manner:
“Conduct simple underwater visual inspections, following predefined procedures and reporting relevant findings.”

Perform underwater visual inspections using ROVs:
“Identify structural anomalies, corrosion, and damage, documenting findings with photographic and video accuracy for detailed technical reports.”

Troubleshooting simple problems and performing basic preventative maintenance on ROVs:
“Identify common faults, replace basic components, and verify correct operation after maintenance by following manuals.”

Interpreting basic data collected by ROV sensors:
“Understanding depth, temperature, pressure, and orientation readings to assess the environment and ROV integrity.”
Apply standard safety protocols during ROV operation:
“Following emergency procedures, mitigating electrical, mechanical and hydraulic risks, and ensuring the isolation and protection of equipment and personnel.”




Academic/professional profile:
Degree/Bachelor's degree in Nautical Science/Maritime Transport, Naval/Marine Engineering, or a related field; or proven professional experience in bridge/operations.

Language proficiency:
Recommended functional maritime English (SMCP) for simulations and technical materials.

5. Induction
Updated resume, copy of degree or seaman's book, ID card/passport, letter of motivation.
Technical requirements (for online):
Equipment with camera/microphone, stable connection, ≥ 24” monitor recommended for ECDIS/Radar-ARPA.

1. Online
application
(form + documents).
2. Academic review and interview
(profile/objectives/schedule compatibility).

3. Admission decision
(+ scholarship proposal if applicable).
4. Reservation of place
(deposit) and registration.

5. Induction
(access to campus, calendars, simulator guides).

During the Introduction to Marine Robotics training, I exceeded my expectations by successfully designing and programming a virtual ROV to perform a simulated inspection mission in an underwater environment. I mastered the principles of buoyancy, propulsion, and control, enabling me to navigate the ROV through an obstacle course and collect accurate sensor data. This achievement confirms my understanding of the fundamentals of marine robotics and my ability to apply them in practical scenarios.
I applied the knowledge from the Robotics and Underwater Technology course to develop an autonomous navigation system for an oil platform inspection ROV, which resulted in a 30% reduction in inspection time and a significant increase in the safety of operations.
I applied the design and control principles learned in the course to improve the stability of an ROV during tank testing. I managed to reduce vehicle drift by 60% by optimizing the thruster configuration and implementing a PID control algorithm. This result allowed for more accurate measurements of the underwater environment, validating the effectiveness of the techniques learned.
I applied the design and control principles learned in the “Introduction to Marine Robots” course to develop an autonomous navigation system for an ROV used to inspect underwater pipelines. This system, successfully tested in simulations and in a controlled environment, reduced inspection time by 30% and improved anomaly detection accuracy by 15% compared to previously used manual methods.